Hi Steve, Perform a "Move" on the Step Response Screen. What happens? Include Screen Shots of your Config, Step Response, and Filters Screens (Alt PrintScreen, paste to Paint.exe, save as *.png) so we can see all your settings. Regards TK
| Group: DynoMotion |
Message: 7668 |
From: ricochetproducts |
Date: 6/15/2013 |
| Subject: Re: Trouble Setting DAC configuration |
Hi Tom, I have uploaded some plot files. I have not tried any filters yet. I don't quite understand them. I need to do some research on them.
I cant seem to get my drive to start smooth or change direction smooth.
--- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@...> wrote:
>
> Hi Steve,
>
> Perform a "Move" on the Step Response Screen. What happens? Include Screen Shots of your Config, Step Response, and Filters Screens (Alt PrintScreen, paste to Paint.exe, save as *.png) so we can see all your settings.
>
> Regards
> TK
>
>
>
>
> ________________________________
> From: ricochetproducts <steveklemp@...>
> To: DynoMotion@yahoogroups.com
> Sent: Sunday, June 9, 2013 5:06 AM
> Subject: [DynoMotion] Trouble Setting DAC configuration
>
>
>
> Â
> Hi Tom, I am having trouble with my Z axis (Chan2) I am just getting started configuring my drives. I have started with KanalogInitialPID.mot for the configuration. Axis X, & Y seem to be working as commanded. Z axis will not operate from the console. I have noticed while watching the Analog output screen, If I send a command from the console I see no change to the output. When I change the
> the Gain on the configuration page I do see a change to the Analog screen and the Axis will move, either + or or -, depending on what I put in the Gain.
>
> Thanks, Steve
>
> PS. I am using the latest software update ver 431
> |
|
| Group: DynoMotion |
Message: 7669 |
From: Tom Kerekes |
Date: 6/15/2013 |
| Subject: Re: Trouble Setting DAC configuration |
Hi Steve, Here are some observations: On the Config Screen set the Output Gain to -1 instead of -3 to be less confusing. On the Step Response Screen remove Feed forwards until you get good closed loop performance. Your Max Jerk Setting is too low (or your acceleration is too high). At that low jerk it would take ~10 seconds to achieve max acceleration (did you read my post on that earlier today?) If you are not using any filters make sure they are clear (unity gain). From that point increase P gain until the system goes unstable then back off by about a factor of 2 and then see where you are. BTW there is a check box when uploading files to notify everyone in the group. No need to check that for every file if you are going to follow up with a post
anyway. Regards TK
| Group: DynoMotion |
Message: 7670 |
From: Steve Klemp |
Date: 6/15/2013 |
| Subject: Re: Trouble Setting DAC configuration |
hi tom thanks for the reply. I will give it a try. sorry for the upload check box.
------------------------------
On Sat, Jun 15, 2013 4:12 PM CDT Tom Kerekes wrote:
>Hi Steve,
>
>Here are some observations:
>
>On the Config Screen set the Output Gain to -1 instead of -3 to be less confusing.
>
>On the Step Response Screen remove Feed forwards until you get good closed loop performance.
>
>Your Max Jerk Setting is too low (or your acceleration is too high). At that low jerk it would take ~10 seconds to achieve max acceleration (did you read my post on that earlier today?)
>
>If you are not using any filters make sure they are clear (unity gain).
>
>From that point increase P gain until the system goes unstable then back off by about a factor of 2 and then see where you are.
>
>BTW there is a check box when uploading files to notify everyone in the group. No need to check that for every file if you are going to follow up with a post anyway.
>
>Regards
>TK
>
>
>
>
>________________________________
> From: ricochetproducts <steveklemp@...>
>To: DynoMotion@yahoogroups.com
>Sent: Saturday, June 15, 2013 12:45 PM
>Subject: [DynoMotion] Re: Trouble Setting DAC configuration
>
>
>
>
>Hi Tom, I have uploaded some plot files. I have not tried any filters yet. I don't quite understand them. I need to do some research on them.
>I cant seem to get my drive to start smooth or change direction smooth.
>
>
>--- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@...> wrote:
>>
>> Hi Steve,
>>
>> Perform a "Move" on the Step Response Screen. What happens? Include Screen Shots of your Config, Step Response, and Filters Screens (Alt PrintScreen, paste to Paint.exe, save as *.png) so we can see all your settings.
>>
>> Regards
>> TK
>>
>>
>>
>>
>> ________________________________
>> From: ricochetproducts <steveklemp@...>
>> To: DynoMotion@yahoogroups.com
>> Sent: Sunday, June 9, 2013 5:06 AM
>> Subject: [DynoMotion] Trouble Setting DAC configuration
>>
>>
>>
>> Â
>> Hi Tom, I am having trouble with my Z axis (Chan2) I am just getting started configuring my drives. I have started with KanalogInitialPID.mot for the configuration. Axis X, & Y seem to be working as commanded. Z axis will not operate from the console. I have noticed while watching the Analog output screen, If I send a command from the console I see no change to the output. When I change the
>> the Gain on the configuration page I do see a change to the Analog screen and the Axis will move, either + or or -, depending on what I put in the Gain.
>>
>> Thanks, Steve
>>
>> PS. I am using the latest software update ver 431
>>
>
>
> |
|
| Group: DynoMotion |
Message: 7671 |
From: Tom Kerekes |
Date: 6/15/2013 |
| Subject: Re: Trouble Setting DAC configuration |
No problem Steve. Post some graphs of your next results. Regards TK
| Group: DynoMotion |
Message: 7672 |
From: ricochetproducts |
Date: 6/17/2013 |
| Subject: Re: Trouble Setting DAC configuration |
Hi Tom, I posted some new Graphs this morning, Thanks for all your help!
....Steve
--- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@...> wrote:
>
> No problem Steve. Post some graphs of your next results.
>
> Regards
> TK
>
>
>
>
> ________________________________
> From: Steve Klemp <steveklemp@...>
> To: dynomotion@yahoogroups.com
> Sent: Saturday, June 15, 2013 2:47 PM
> Subject: Re: [DynoMotion] Re: Trouble Setting DAC configuration
>
>
>
> Â
>
> hi tom thanks for the reply. I will give it a try. sorry for the upload check box.
>
> ------------------------------
> On Sat, Jun 15, 2013 4:12 PM CDT Tom Kerekes wrote:
>
> >Hi Steve,
> >
> >Here are some observations:
> >
> >On the Config Screen set the Output Gain to -1 instead of -3 to be less confusing.
> >
> >On the Step Response Screen remove Feed forwards until you get good closed loop performance.
> >
> >Your Max Jerk Setting is too low (or your acceleration is too high). At that low jerk it would take ~10 seconds to achieve max acceleration (did you read my post on that earlier today?)
> >
> >If you are not using any filters make sure they are clear (unity gain).
> >
> >From that point increase P gain until the system goes unstable then back off by about a factor of 2 and then see where you are.
> >
> >BTW there is a check box when uploading files to notify everyone in the group. No need to check that for every file if you are going to follow up with a post anyway.
> >
> >Regards
> >TK
> >
> >
> >
> >
> >________________________________
> > From: ricochetproducts <steveklemp@...>
> >To: DynoMotion@yahoogroups.com
> >Sent: Saturday, June 15, 2013 12:45 PM
> >Subject: [DynoMotion] Re: Trouble Setting DAC configuration
> >
> >
> >
> >Â
> >Hi Tom, I have uploaded some plot files. I have not tried any filters yet. I don't quite understand them. I need to do some research on them.
> >I cant seem to get my drive to start smooth or change direction smooth.
> >
> >
> >--- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> >>
> >> Hi Steve,
> >>
> >> Perform a "Move" on the Step Response Screen.ÃÂ What happens?ÃÂ Include Screen Shots of your Config, Step Response, and Filters Screens (Alt PrintScreen, paste to Paint.exe, save as *.png) so we can see all your settings.
> >>
> >> Regards
> >> TK
> >>
> >>
> >>
> >>
> >> ________________________________
> >> From: ricochetproducts <steveklemp@>
> >> To: DynoMotion@yahoogroups.com
> >> Sent: Sunday, June 9, 2013 5:06 AM
> >> Subject: [DynoMotion] Trouble Setting DAC configuration
> >>
> >>
> >>
> >> ÃÂ
> >> Hi Tom, I am having trouble with my Z axis (Chan2) I am just getting started configuring my drives. I have started with KanalogInitialPID.mot for the configuration. Axis X, & Y seem to be working as commanded. Z axis will not operate from the console. I have noticed while watching the Analog output screen, If I send a command from the console I see no change to the output. When I change the
> >> the Gain on the configuration page I do see a change to the Analog screen and the Axis will move, either + or or -, depending on what I put in the Gain.
> >>
> >> Thanks, Steve
> >>
> >> PS. I am using the latest software update ver 431
> >>
> >
> >
> >
> |
|
| Group: DynoMotion |
Message: 7673 |
From: Tom Kerekes |
Date: 6/17/2013 |
| Subject: Re: Trouble Setting DAC configuration |
Hi Steve, The Plot looks reasonable. However the following error looks fairly large. It is hard to see without being able to zoom in or plot in different ways. If you also saved and posted the raw data we could plot in different ways. You didn't tell us what you tried and what happened. Did you try to increase gains higher (P and D)? I gain should help reduce the persistent errors. Start with a small number like 0.0001 and increase by factors of 2 until you see an effect.
You will also need to increase Max Integrator to 2047 to allow the Integrator to make larger corrections.
Regards TK
| Group: DynoMotion |
Message: 7675 |
From: ricochetproducts |
Date: 6/17/2013 |
| Subject: Re: Trouble Setting DAC configuration |
Hi Tom,
I posted the raw data.
I changed the Max Limits. OUTPUT 2024 to 2047
Motion Profile Accel 50000000 to 100000
Jerk 550000 to 1e+006
PID P.36 to .9
D 1.5 to 14
--- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@...> wrote:
>
> Hi Steve,
>
> The Plot looks reasonable. However the following error looks fairly large. It is hard to see without being able to zoom in or plot in different ways. If you also saved and posted the raw data we could plot in different ways.
>
> You didn't tell us what you tried and what happened. Did you try to increase gains higher (P and D)?
>
> I gain should help reduce the persistent errors. Start with a small number like 0.0001 and increase by factors of 2 until you see an effect.
>
>
> You will also need to increase Max Integrator to 2047 to allow the Integrator to make larger corrections.
>
> Regards
> TK
>
>
>
>
>
> ________________________________
> From: ricochetproducts <steveklemp@...>
> To: DynoMotion@yahoogroups.com
> Sent: Monday, June 17, 2013 5:51 AM
> Subject: [DynoMotion] Re: Trouble Setting DAC configuration
>
>
>
> Â
> Hi Tom, I posted some new Graphs this morning, Thanks for all your help!
>
> ....Steve
>
> --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> >
> > No problem Steve.ÃÂ Post some graphs of your next results.
> >
> > Regards
> > TK
> >
> >
> >
> >
> > ________________________________
> > From: Steve Klemp <steveklemp@>
> > To: dynomotion@yahoogroups.com
> > Sent: Saturday, June 15, 2013 2:47 PM
> > Subject: Re: [DynoMotion] Re: Trouble Setting DAC configuration
> >
> >
> >
> > ÃÂ
> >
> > hi tom thanks for the reply. I will give it a try. sorry for the upload check box.
> >
> > ------------------------------
> > On Sat, Jun 15, 2013 4:12 PM CDT Tom Kerekes wrote:
> >
> > >Hi Steve,
> > >
> > >Here are some observations:
> > >
> > >On the Config Screen set the Output Gain to -1 instead of -3 to be less confusing.
> > >
> > >On the Step Response Screen remove Feed forwards until you get good closed loop performance.
> > >
> > >Your Max Jerk Setting is too low (or your acceleration is too high).ÃÂ At that low jerk it would take ~10 seconds to achieve max acceleration (did you read my post on that earlier today?)
> > >
> > >If you are not using any filters make sure they are clear (unity gain).
> > >
> > >From that point increase P gain until the system goes unstable then back off by about a factor of 2 and then see where you are.
> > >
> > >BTW there is a check box when uploading files to notify everyone in the group.ÃÂ No need to check that for every file if you are going to follow up with a post anyway.
> > >
> > >Regards
> > >TK
> > >
> > >
> > >
> > >
> > >________________________________
> > > From: ricochetproducts <steveklemp@>
> > >To: DynoMotion@yahoogroups.com
> > >Sent: Saturday, June 15, 2013 12:45 PM
> > >Subject: [DynoMotion] Re: Trouble Setting DAC configuration
> > >
> > >
> > >
> > >ÃÂ
> > >Hi Tom, I have uploaded some plot files. I have not tried any filters yet. I don't quite understand them. I need to do some research on them.
> > >I cant seem to get my drive to start smooth or change direction smooth.
> > >
> > >
> > >--- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > >>
> > >> Hi Steve,
> > >>
> > >> Perform a "Move" on the Step Response Screen.ÃâàWhat happens?ÃâàInclude Screen Shots of your Config, Step Response, and Filters Screens (Alt PrintScreen, paste to Paint.exe, save as *.png) so we can see all your settings.
> > >>
> > >> Regards
> > >> TK
> > >>
> > >>
> > >>
> > >>
> > >> ________________________________
> > >> From: ricochetproducts <steveklemp@>
> > >> To: DynoMotion@yahoogroups.com
> > >> Sent: Sunday, June 9, 2013 5:06 AM
> > >> Subject: [DynoMotion] Trouble Setting DAC configuration
> > >>
> > >>
> > >>
> > >> ÃâÃÂ
> > >> Hi Tom, I am having trouble with my Z axis (Chan2) I am just getting started configuring my drives. I have started with KanalogInitialPID.mot for the configuration. Axis X, & Y seem to be working as commanded. Z axis will not operate from the console. I have noticed while watching the Analog output screen, If I send a command from the console I see no change to the output. When I change the
> > >> the Gain on the configuration page I do see a change to the Analog screen and the Axis will move, either + or or -, depending on what I put in the Gain.
> > >>
> > >> Thanks, Steve
> > >>
> > >> PS. I am using the latest software update ver 431
> > >>
> > >
> > >
> > >
> >
> |
|
| Group: DynoMotion |
Message: 7678 |
From: Tom Kerekes |
Date: 6/17/2013 |
| Subject: Re: Trouble Setting DAC configuration |
Hi Steve, Have you tried the other suggestions? What happened? Did you increase the Max Integrator? Also what is your system resolution? (how many counts per inch or mm)?
Regards TK
| Group: DynoMotion |
Message: 7690 |
From: ricochetproducts |
Date: 6/19/2013 |
| Subject: Re: Trouble Setting DAC configuration |
Hi Tom, I have made changes to my PID per your recomendations. and posted new plot data.
I have increased Max Integrator to 2047 and increased the P and D gains I have also added I gain 0.0001 any higher here and overshoot at the top of the plot.
I have set P to 1.0 I had resonance @ 1.2
I have set the D to 20 I had resonance starting @ 40 and hard stopping at the end of a move @ 24
I have done all that I know to do at this point and am looking to you for advice. Any input would be appreciated as I really don't understand the plots. Y axis seems to be functioning OK. Just seems to accel and decel a little to fast (in my oppinion)
--- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@...> wrote:
>
> Hi Steve,
>
> Have you tried the other suggestions?  What happened?
>
> Did you increase the Max Integrator?
>
> Also what is your system resolution? (how many counts per inch or mm)?
>
>
> Regards
> TK
>
>
>
>
> ________________________________
> From: ricochetproducts <steveklemp@...>
> To: DynoMotion@yahoogroups.com
> Sent: Monday, June 17, 2013 10:54 AM
> Subject: [DynoMotion] Re: Trouble Setting DAC configuration
>
>
>
> Â
> Hi Tom,
> I posted the raw data.
> I changed the Max Limits. OUTPUT 2024 to 2047
>
> Motion Profile Accel 50000000 to 100000
> Jerk 550000 to 1e+006
> PID P.36 to .9
> D 1.5 to 14
> --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> >
> > Hi Steve,
> >
> > The Plot looks reasonable.ÃÂ However the following error looks fairly large.ÃÂ It is hard to see without being able to zoom in or plot in different ways.ÃÂ If you also saved and posted the raw data we could plot in different ways.
> >
> > You didn't tell us what you tried and what happened.ÃÂ Did you try to increase gains higher (P and D)?
> >
> > I gain should help reduce the persistent errors.ÃÂ Start with a small number like 0.0001 and increase by factors of 2 until you see an effect.
> >
> >
> > You will also need to increase Max Integrator to 2047 to allow the Integrator to make larger corrections.
> >
> > Regards
> > TK
> >
> >
> >
> >
> >
> > ________________________________
> > From: ricochetproducts <steveklemp@>
> > To: DynoMotion@yahoogroups.com
> > Sent: Monday, June 17, 2013 5:51 AM
> > Subject: [DynoMotion] Re: Trouble Setting DAC configuration
> >
> >
> >
> > ÃÂ
> > Hi Tom, I posted some new Graphs this morning, Thanks for all your help!
> >
> > ....Steve
> >
> > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > >
> > > No problem Steve.ÃâàPost some graphs of your next results.
> > >
> > > Regards
> > > TK
> > >
> > >
> > >
> > >
> > > ________________________________
> > > From: Steve Klemp <steveklemp@>
> > > To: dynomotion@yahoogroups.com
> > > Sent: Saturday, June 15, 2013 2:47 PM
> > > Subject: Re: [DynoMotion] Re: Trouble Setting DAC configuration
> > >
> > >
> > >
> > > ÃâÃÂ
> > >
> > > hi tom thanks for the reply. I will give it a try. sorry for the upload check box.
> > >
> > > ------------------------------
> > > On Sat, Jun 15, 2013 4:12 PM CDT Tom Kerekes wrote:
> > >
> > > >Hi Steve,
> > > >
> > > >Here are some observations:
> > > >
> > > >On the Config Screen set the Output Gain to -1 instead of -3 to be less confusing.
> > > >
> > > >On the Step Response Screen remove Feed forwards until you get good closed loop performance.
> > > >
> > > >Your Max Jerk Setting is too low (or your acceleration is too high).ÃâàAt that low jerk it would take ~10 seconds to achieve max acceleration (did you read my post on that earlier today?)
> > > >
> > > >If you are not using any filters make sure they are clear (unity gain).
> > > >
> > > >From that point increase P gain until the system goes unstable then back off by about a factor of 2 and then see where you are.
> > > >
> > > >BTW there is a check box when uploading files to notify everyone in the group.ÃâàNo need to check that for every file if you are going to follow up with a post anyway.
> > > >
> > > >Regards
> > > >TK
> > > >
> > > >
> > > >
> > > >
> > > >________________________________
> > > > From: ricochetproducts <steveklemp@>
> > > >To: DynoMotion@yahoogroups.com
> > > >Sent: Saturday, June 15, 2013 12:45 PM
> > > >Subject: [DynoMotion] Re: Trouble Setting DAC configuration
> > > >
> > > >
> > > >
> > > >ÃâÃÂ
> > > >Hi Tom, I have uploaded some plot files. I have not tried any filters yet. I don't quite understand them. I need to do some research on them.
> > > >I cant seem to get my drive to start smooth or change direction smooth.
> > > >
> > > >
> > > >--- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > >>
> > > >> Hi Steve,
> > > >>
> > > >> Perform a "Move" on the Step Response Screen.ÃÆ'ââ¬Å¡ÃâàWhat happens?ÃÆ'ââ¬Å¡ÃâàInclude Screen Shots of your Config, Step Response, and Filters Screens (Alt PrintScreen, paste to Paint.exe, save as *.png) so we can see all your settings.
> > > >>
> > > >> Regards
> > > >> TK
> > > >>
> > > >>
> > > >>
> > > >>
> > > >> ________________________________
> > > >> From: ricochetproducts <steveklemp@>
> > > >> To: DynoMotion@yahoogroups.com
> > > >> Sent: Sunday, June 9, 2013 5:06 AM
> > > >> Subject: [DynoMotion] Trouble Setting DAC configuration
> > > >>
> > > >>
> > > >>
> > > >> ÃÆ'ââ¬Å¡ÃâÃÂ
> > > >> Hi Tom, I am having trouble with my Z axis (Chan2) I am just getting started configuring my drives. I have started with KanalogInitialPID.mot for the configuration. Axis X, & Y seem to be working as commanded. Z axis will not operate from the console. I have noticed while watching the Analog output screen, If I send a command from the console I see no change to the output. When I change the
> > > >> the Gain on the configuration page I do see a change to the Analog screen and the Axis will move, either + or or -, depending on what I put in the Gain.
> > > >>
> > > >> Thanks, Steve
> > > >>
> > > >> PS. I am using the latest software update ver 431
> > > >>
> > > >
> > > >
> > > >
> > >
> >
> |
|
| Group: DynoMotion |
Message: 7694 |
From: Tom Kerekes |
Date: 6/19/2013 |
| Subject: Re: Trouble Setting DAC configuration |
Hi Steve,
It still seem that the I gain is too low and doing nothing. Notice that after motion stops an error of around 25 counts just remains for a long time (0.4 seconds) without being corrected. This is the job of the Integrator. Also during the move an error of around 800 counts persists. Increase the I gain by a factor of 10 and post a plot so we can see what you describe as overshoot. Actually increase I until the system goes unstable to see where we can
operate.
Regards TK
| Group: DynoMotion |
Message: 7718 |
From: ricochetproducts |
Date: 6/20/2013 |
| Subject: Re: Trouble Setting DAC configuration |
Hi Tom, I have my latest plots posted now. You will notice that at the top left side of the curve the position rises above the commanded when I increase the I. This is what I was talking about when I said it would overshoot. Also if I raise the I more the servo begins to oscillate. (runs +/-) .002
I also changed my move distance to 1" for the test plots.
Thanks, Steve
--- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@...> wrote:
>
> Hi Steve,
>
> It still seem that the I gain is too low and doing nothing. Notice that after motion stops an error of around 25 counts just remains for a long time (0.4 seconds) without being corrected. This is the job of the Integrator. Also during the move an error of around 800 counts persists. Increase the I gain by a factor of 10 and post a plot so we can see what you describe as overshoot. Actually increase I until the system goes unstable to see where we can operate.
>
>
> Regards
> TK
>
>
>
> ________________________________
> From: ricochetproducts <steveklemp@...>
> To: DynoMotion@yahoogroups.com
> Sent: Wednesday, June 19, 2013 6:06 AM
> Subject: [DynoMotion] Re: Trouble Setting DAC configuration
>
>
>
> Â
> Hi Tom, I have made changes to my PID per your recomendations. and posted new plot data.
> I have increased Max Integrator to 2047 and increased the P and D gains I have also added I gain 0.0001 any higher here and overshoot at the top of the plot.
> I have set P to 1.0 I had resonance @ 1.2
> I have set the D to 20 I had resonance starting @ 40 and hard stopping at the end of a move @ 24
>
> I have done all that I know to do at this point and am looking to you for advice. Any input would be appreciated as I really don't understand the plots. Y axis seems to be functioning OK. Just seems to accel and decel a little to fast (in my oppinion)
>
> --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> >
> > Hi Steve,
> >
> > Have you tried the other suggestions?ÃÂ ÃÂ What happened?
> >
> > Did you increase the Max Integrator?
> >
> > Also what is your system resolution?ÃÂ (how many counts per inch or mm)?
> >
> >
> > Regards
> > TK
> >
> >
> >
> >
> > ________________________________
> > From: ricochetproducts <steveklemp@>
> > To: DynoMotion@yahoogroups.com
> > Sent: Monday, June 17, 2013 10:54 AM
> > Subject: [DynoMotion] Re: Trouble Setting DAC configuration
> >
> >
> >
> > ÃÂ
> > Hi Tom,
> > I posted the raw data.
> > I changed the Max Limits. OUTPUT 2024 to 2047
> >
> > Motion Profile Accel 50000000 to 100000
> > Jerk 550000 to 1e+006
> > PID P.36 to .9
> > D 1.5 to 14
> > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > >
> > > Hi Steve,
> > >
> > > The Plot looks reasonable.ÃâàHowever the following error looks fairly large.ÃâàIt is hard to see without being able to zoom in or plot in different ways.ÃâàIf you also saved and posted the raw data we could plot in different ways.
> > >
> > > You didn't tell us what you tried and what happened.ÃâàDid you try to increase gains higher (P and D)?
> > >
> > > I gain should help reduce the persistent errors.ÃâàStart with a small number like 0.0001 and increase by factors of 2 until you see an effect.
> > >
> > >
> > > You will also need to increase Max Integrator to 2047 to allow the Integrator to make larger corrections.
> > >
> > > Regards
> > > TK
> > >
> > >
> > >
> > >
> > >
> > > ________________________________
> > > From: ricochetproducts <steveklemp@>
> > > To: DynoMotion@yahoogroups.com
> > > Sent: Monday, June 17, 2013 5:51 AM
> > > Subject: [DynoMotion] Re: Trouble Setting DAC configuration
> > >
> > >
> > >
> > > ÃâÃÂ
> > > Hi Tom, I posted some new Graphs this morning, Thanks for all your help!
> > >
> > > ....Steve
> > >
> > > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > >
> > > > No problem Steve.ÃÆ'ââ¬Å¡ÃâàPost some graphs of your next results.
> > > >
> > > > Regards
> > > > TK
> > > >
> > > >
> > > >
> > > >
> > > > ________________________________
> > > > From: Steve Klemp <steveklemp@>
> > > > To: dynomotion@yahoogroups.com
> > > > Sent: Saturday, June 15, 2013 2:47 PM
> > > > Subject: Re: [DynoMotion] Re: Trouble Setting DAC configuration
> > > >
> > > >
> > > >
> > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > >
> > > > hi tom thanks for the reply. I will give it a try. sorry for the upload check box.
> > > >
> > > > ------------------------------
> > > > On Sat, Jun 15, 2013 4:12 PM CDT Tom Kerekes wrote:
> > > >
> > > > >Hi Steve,
> > > > >
> > > > >Here are some observations:
> > > > >
> > > > >On the Config Screen set the Output Gain to -1 instead of -3 to be less confusing.
> > > > >
> > > > >On the Step Response Screen remove Feed forwards until you get good closed loop performance.
> > > > >
> > > > >Your Max Jerk Setting is too low (or your acceleration is too high).ÃÆ'ââ¬Å¡ÃâàAt that low jerk it would take ~10 seconds to achieve max acceleration (did you read my post on that earlier today?)
> > > > >
> > > > >If you are not using any filters make sure they are clear (unity gain).
> > > > >
> > > > >From that point increase P gain until the system goes unstable then back off by about a factor of 2 and then see where you are.
> > > > >
> > > > >BTW there is a check box when uploading files to notify everyone in the group.ÃÆ'ââ¬Å¡ÃâàNo need to check that for every file if you are going to follow up with a post anyway.
> > > > >
> > > > >Regards
> > > > >TK
> > > > >
> > > > >
> > > > >
> > > > >
> > > > >________________________________
> > > > > From: ricochetproducts <steveklemp@>
> > > > >To: DynoMotion@yahoogroups.com
> > > > >Sent: Saturday, June 15, 2013 12:45 PM
> > > > >Subject: [DynoMotion] Re: Trouble Setting DAC configuration
> > > > >
> > > > >
> > > > >
> > > > >ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > >Hi Tom, I have uploaded some plot files. I have not tried any filters yet. I don't quite understand them. I need to do some research on them.
> > > > >I cant seem to get my drive to start smooth or change direction smooth.
> > > > >
> > > > >
> > > > >--- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > > >>
> > > > >> Hi Steve,
> > > > >>
> > > > >> Perform a "Move" on the Step Response Screen.ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàWhat happens?ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàInclude Screen Shots of your Config, Step Response, and Filters Screens (Alt PrintScreen, paste to Paint.exe, save as *.png) so we can see all your settings.
> > > > >>
> > > > >> Regards
> > > > >> TK
> > > > >>
> > > > >>
> > > > >>
> > > > >>
> > > > >> ________________________________
> > > > >> From: ricochetproducts <steveklemp@>
> > > > >> To: DynoMotion@yahoogroups.com
> > > > >> Sent: Sunday, June 9, 2013 5:06 AM
> > > > >> Subject: [DynoMotion] Trouble Setting DAC configuration
> > > > >>
> > > > >>
> > > > >>
> > > > >> ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > >> Hi Tom, I am having trouble with my Z axis (Chan2) I am just getting started configuring my drives. I have started with KanalogInitialPID.mot for the configuration. Axis X, & Y seem to be working as commanded. Z axis will not operate from the console. I have noticed while watching the Analog output screen, If I send a command from the console I see no change to the output. When I change the
> > > > >> the Gain on the configuration page I do see a change to the Analog screen and the Axis will move, either + or or -, depending on what I put in the Gain.
> > > > >>
> > > > >> Thanks, Steve
> > > > >>
> > > > >> PS. I am using the latest software update ver 431
> > > > >>
> > > > >
> > > > >
> > > > >
> > > >
> > >
> >
> |
|
| Group: DynoMotion |
Message: 7725 |
From: Tom Kerekes |
Date: 6/20/2013 |
| Subject: Re: Trouble Setting DAC configuration |
Hi Steve,
That looks as expected. It is somewhat difficult to explain but an integrator will always "overshoot". Or rather any Integrator gain at all guarantees the average error to be exactly zero. If the position spends time under the target position it will force time spent above the target position to cancel out. The higher the gain the faster response. With the super low I gain you had before, the Integrator had a
super slow response time of like 1 minute. During the several seconds of movement the Integrator hardly responded at all but accumulated the big (negative) following error for the several seconds. It then forced a small positive error for a minute after the move to make up the difference. If you look back at the earlier plots there still was overshoot. But it was small and lasted for a very long time.
Now the Integrator response is much faster. But still relatively slow. It is on the order of several seconds which is about the time to make the move. It has a minor but significant effect. I think it reduced the
max following error during the move from ~ 800 counts to ~ 500 counts. But it is just beginning to pull the error from negative to positive by the end of the move, which results in a positive error for about 0.5 seconds.
We would like to get the response to be much faster so that the error swings positive and negative several times throughout the move so there is little to be canceled out after the move.
Anyways the point I'm trying to make is that it may look worse, but I thing we are actually better off. Sorry Control Theory is complicated :}
Before we can increase the I gain any further (I don't really understand what you tried and what happened so I'm sort of running blind) we will probably need to add more D gain. D gain can help make the system more stable. It has a damping effect. You can see 30 count spikes in the output (green plot) caused by
the D Gain of 30 every time the encoder changes 1 count. As we increase the D gain the spikes will get bigger and can cause problems (or not really be effective) for the amplifier. NArrow spikes are high frquency things so we can add a Low Pass filter to smooth them out. On the Filters Screen, on the right most Filter Number #2, select 2nd order Low pass, Frequency of 1000, Q=1.4, and push Compute. This should smooth the green spikes. Then try to see how high you can increase the D Gain.
HTH Regards TK
| Group: DynoMotion |
Message: 7726 |
From: ricochetproducts |
Date: 6/21/2013 |
| Subject: Re: Trouble Setting DAC configuration |
Hi Tom, New files uploaded. I did add the filter (None to 1000) and did see improvement. I was able to add some more I. (.0005 to .0009) Then I added more filter (2500 hz) till the plot seemed to get worse instead of better, then I back the filter off a little (2150 hz) .I think the plots are getting better. But, With more I, The servo seems to want to hunt more. I posted a video of this so you could see what I am talking about. I raised the D (30 to 43)up as far as I could. Any more and it seems to sound like the Axis is in a bind and makes a growling noise.
"Sorry Control Theory is complicated :}" Yes it is, But Thank You for your patience!
.....Steve
--- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@...> wrote:
>
> Hi Steve,
>
> That looks as expected. It is somewhat difficult to explain but an integrator will always "overshoot". Or rather any Integrator gain at all guarantees the average error to be exactly zero. If the position spends time under the target position it will force time spent above the target position to cancel out. The higher the gain the faster response. With the super low I gain you had before, the Integrator had a super slow response time of like 1 minute. During the several seconds of movement the Integrator hardly responded at all but accumulated the big (negative) following error for the several seconds. It then forced a small positive error for a minute after the move to make up the difference. If you look back at the earlier plots there still was overshoot. But it was small and lasted for a very long time.
>
> Now the Integrator response is much faster. But still relatively slow. It is on the order of several seconds which is about the time to make the move. It has a minor but significant effect. I think it reduced the max following error during the move from ~ 800 counts to ~ 500 counts.  But it is just beginning to pull the error from negative to positive by the end of the move, which results in a positive error for about 0.5 seconds.
>
> We would like to get the response to be much faster so that the error swings positive and negative several times throughout the move so there is little to be canceled out after the move.
>
>
> Anyways the point I'm trying to make is that it may look worse, but I thing we are actually better off. Sorry Control Theory is complicated :}
>
>
> Before we can increase the I gain any further (I don't really understand what you tried and what happened so I'm sort of running blind) we will probably need to add more D gain. D gain can help make the system more stable. It has a damping effect. You can see 30 count spikes in the output (green plot) caused by the D Gain of 30 every time the encoder changes 1 count. As we increase the D gain the spikes will get bigger and can cause problems (or not really be effective) for the amplifier. NArrow spikes are high frquency things so we can add a Low Pass filter to smooth them out. On the Filters Screen, on the right most Filter Number #2, select 2nd order Low pass, Frequency of 1000, Q=1.4, and push Compute. This should smooth the green spikes. Then try to see how high you can increase the D Gain.
>
> HTH
> Regards
> TK
>
>
>
>
>
> ________________________________
> From: ricochetproducts <steveklemp@...>
> To: DynoMotion@yahoogroups.com
> Sent: Thursday, June 20, 2013 12:32 PM
> Subject: [DynoMotion] Re: Trouble Setting DAC configuration
>
>
>
> Â
> Hi Tom, I have my latest plots posted now. You will notice that at the top left side of the curve the position rises above the commanded when I increase the I. This is what I was talking about when I said it would overshoot. Also if I raise the I more the servo begins to oscillate. (runs +/-) .002
>
> I also changed my move distance to 1" for the test plots.
>
> Thanks, Steve
>
> --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> >
> > Hi Steve,
> >
> > It still seem that the I gain is too low and doing nothing.ÃÂ Notice that after motion stops an error of around 25 counts just remains for a long time (0.4 seconds) without being corrected.ÃÂ This is the job of the Integrator.ÃÂ Also during the move an error of around 800 counts persists.ÃÂ Increase the I gain by a factor of 10 and post a plot so we can see what you describe as overshoot.ÃÂ Actually increase I until the system goes unstable to see where we can operate.
> >
> >
> > Regards
> > TK
> >
> >
> >
> > ________________________________
> > From: ricochetproducts <steveklemp@>
> > To: DynoMotion@yahoogroups.com
> > Sent: Wednesday, June 19, 2013 6:06 AM
> > Subject: [DynoMotion] Re: Trouble Setting DAC configuration
> >
> >
> >
> > ÃÂ
> > Hi Tom, I have made changes to my PID per your recomendations. and posted new plot data.
> > I have increased Max Integrator to 2047 and increased the P and D gains I have also added I gain 0.0001 any higher here and overshoot at the top of the plot.
> > I have set P to 1.0 I had resonance @ 1.2
> > I have set the D to 20 I had resonance starting @ 40 and hard stopping at the end of a move @ 24
> >
> > I have done all that I know to do at this point and am looking to you for advice. Any input would be appreciated as I really don't understand the plots. Y axis seems to be functioning OK. Just seems to accel and decel a little to fast (in my oppinion)
> >
> > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > >
> > > Hi Steve,
> > >
> > > Have you tried the other suggestions?ÃâàÃâàWhat happened?
> > >
> > > Did you increase the Max Integrator?
> > >
> > > Also what is your system resolution?Ãâà(how many counts per inch or mm)?
> > >
> > >
> > > Regards
> > > TK
> > >
> > >
> > >
> > >
> > > ________________________________
> > > From: ricochetproducts <steveklemp@>
> > > To: DynoMotion@yahoogroups.com
> > > Sent: Monday, June 17, 2013 10:54 AM
> > > Subject: [DynoMotion] Re: Trouble Setting DAC configuration
> > >
> > >
> > >
> > > ÃâÃÂ
> > > Hi Tom,
> > > I posted the raw data.
> > > I changed the Max Limits. OUTPUT 2024 to 2047
> > >
> > > Motion Profile Accel 50000000 to 100000
> > > Jerk 550000 to 1e+006
> > > PID P.36 to .9
> > > D 1.5 to 14
> > > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > >
> > > > Hi Steve,
> > > >
> > > > The Plot looks reasonable.ÃÆ'ââ¬Å¡ÃâàHowever the following error looks fairly large.ÃÆ'ââ¬Å¡ÃâàIt is hard to see without being able to zoom in or plot in different ways.ÃÆ'ââ¬Å¡ÃâàIf you also saved and posted the raw data we could plot in different ways.
> > > >
> > > > You didn't tell us what you tried and what happened.ÃÆ'ââ¬Å¡ÃâàDid you try to increase gains higher (P and D)?
> > > >
> > > > I gain should help reduce the persistent errors.ÃÆ'ââ¬Å¡ÃâàStart with a small number like 0.0001 and increase by factors of 2 until you see an effect.
> > > >
> > > >
> > > > You will also need to increase Max Integrator to 2047 to allow the Integrator to make larger corrections.
> > > >
> > > > Regards
> > > > TK
> > > >
> > > >
> > > >
> > > >
> > > >
> > > > ________________________________
> > > > From: ricochetproducts <steveklemp@>
> > > > To: DynoMotion@yahoogroups.com
> > > > Sent: Monday, June 17, 2013 5:51 AM
> > > > Subject: [DynoMotion] Re: Trouble Setting DAC configuration
> > > >
> > > >
> > > >
> > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > Hi Tom, I posted some new Graphs this morning, Thanks for all your help!
> > > >
> > > > ....Steve
> > > >
> > > > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > > >
> > > > > No problem Steve.ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàPost some graphs of your next results.
> > > > >
> > > > > Regards
> > > > > TK
> > > > >
> > > > >
> > > > >
> > > > >
> > > > > ________________________________
> > > > > From: Steve Klemp <steveklemp@>
> > > > > To: dynomotion@yahoogroups.com
> > > > > Sent: Saturday, June 15, 2013 2:47 PM
> > > > > Subject: Re: [DynoMotion] Re: Trouble Setting DAC configuration
> > > > >
> > > > >
> > > > >
> > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > >
> > > > > hi tom thanks for the reply. I will give it a try. sorry for the upload check box.
> > > > >
> > > > > ------------------------------
> > > > > On Sat, Jun 15, 2013 4:12 PM CDT Tom Kerekes wrote:
> > > > >
> > > > > >Hi Steve,
> > > > > >
> > > > > >Here are some observations:
> > > > > >
> > > > > >On the Config Screen set the Output Gain to -1 instead of -3 to be less confusing.
> > > > > >
> > > > > >On the Step Response Screen remove Feed forwards until you get good closed loop performance.
> > > > > >
> > > > > >Your Max Jerk Setting is too low (or your acceleration is too high).ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàAt that low jerk it would take ~10 seconds to achieve max acceleration (did you read my post on that earlier today?)
> > > > > >
> > > > > >If you are not using any filters make sure they are clear (unity gain).
> > > > > >
> > > > > >From that point increase P gain until the system goes unstable then back off by about a factor of 2 and then see where you are.
> > > > > >
> > > > > >BTW there is a check box when uploading files to notify everyone in the group.ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàNo need to check that for every file if you are going to follow up with a post anyway.
> > > > > >
> > > > > >Regards
> > > > > >TK
> > > > > >
> > > > > >
> > > > > >
> > > > > >
> > > > > >________________________________
> > > > > > From: ricochetproducts <steveklemp@>
> > > > > >To: DynoMotion@yahoogroups.com
> > > > > >Sent: Saturday, June 15, 2013 12:45 PM
> > > > > >Subject: [DynoMotion] Re: Trouble Setting DAC configuration
> > > > > >
> > > > > >
> > > > > >
> > > > > >ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > >Hi Tom, I have uploaded some plot files. I have not tried any filters yet. I don't quite understand them. I need to do some research on them.
> > > > > >I cant seem to get my drive to start smooth or change direction smooth.
> > > > > >
> > > > > >
> > > > > >--- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > > > >>
> > > > > >> Hi Steve,
> > > > > >>
> > > > > >> Perform a "Move" on the Step Response Screen.ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàWhat happens?ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàInclude Screen Shots of your Config, Step Response, and Filters Screens (Alt PrintScreen, paste to Paint.exe, save as *.png) so we can see all your settings.
> > > > > >>
> > > > > >> Regards
> > > > > >> TK
> > > > > >>
> > > > > >>
> > > > > >>
> > > > > >>
> > > > > >> ________________________________
> > > > > >> From: ricochetproducts <steveklemp@>
> > > > > >> To: DynoMotion@yahoogroups.com
> > > > > >> Sent: Sunday, June 9, 2013 5:06 AM
> > > > > >> Subject: [DynoMotion] Trouble Setting DAC configuration
> > > > > >>
> > > > > >>
> > > > > >>
> > > > > >> ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > >> Hi Tom, I am having trouble with my Z axis (Chan2) I am just getting started configuring my drives. I have started with KanalogInitialPID.mot for the configuration. Axis X, & Y seem to be working as commanded. Z axis will not operate from the console. I have noticed while watching the Analog output screen, If I send a command from the console I see no change to the output. When I change the
> > > > > >> the Gain on the configuration page I do see a change to the Analog screen and the Axis will move, either + or or -, depending on what I put in the Gain.
> > > > > >>
> > > > > >> Thanks, Steve
> > > > > >>
> > > > > >> PS. I am using the latest software update ver 431
> > > > > >>
> > > > > >
> > > > > >
> > > > > >
> > > > >
> > > >
> > >
> >
> |
|
| Group: DynoMotion |
Message: 7729 |
From: Tom Kerekes |
Date: 6/21/2013 |
| Subject: Re: Trouble Setting DAC configuration |
Hi Steve,
Actually lowering the frequency of the Low Pass filter increases its effect. Try setting back to 1000 and possibly lower down to 500 Hz.
There
seems to be an instability causing ~50 Hz oscillation. Let's see if we can get a Bode Plot Measurement. Bode Plots are a bit tricky to make. It is basically like shaking the system to see how it responds dynamically. You need to shake it hard enough to get some movement but not too hard to get out of normal ranges. Shake it too little and the measurement will be meaningless or shake it too hard and the measurement will be meaningless. You might read the section in the manual on Bode Plots:
http://dynomotion.com/Help/BodeScreen/BodeScreen.htm
Set things to your most reasonable settings and go to the Bode Plot Screen. Then select Time domain and make measurements while adjusting the stimulus amplitude until you see some activity in the red plot, but not too huge of output commands (green). Then make a frequency domain plot.
I believe I do see some mechanical issues in your system in the previous plots. Most likely some backlash or stiction. If you zoom in looking at the Position plot (red) when the axis comes to a stop it seems to stick. The output (green) plot ramps up a fair amount with still no change in position at all. Then
suddenly it jumps. It is hard to say how bad things really are without knowing the resolution of your system.
Regards TK
| Group: DynoMotion |
Message: 7742 |
From: ricochetproducts |
Date: 6/22/2013 |
| Subject: Re: Trouble Setting DAC configuration |
Hi Tom, I posted some more files! I did some Bode plots and posted the as well. I did return the filter to 1000 Hz and also tried 500 Hz.
I can't really say that I noticed any improvements.
I do hope that the BODE Plots will be helpful!
You will also find plots and a Bode plot for the X axis. I thought I would give it a try also. as you can see, I am able to run PID numbers much higher. But, As I said before, I really don't understand the tuning and I really don't know what I am looking for.
The X axis runs really smooth but if I tell it to go 10 inches it runs fine but when it reaches stopping point it stops suddenly!
Thank you for your help and your patience.
....Steve
--- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@...> wrote:
>
> Hi Steve,
>
> Actually lowering the frequency of the Low Pass filter increases its effect. Try setting back to 1000 and possibly lower down to 500 Hz.
>
> There seems to be an instability causing ~50 Hz oscillation. Let's see if we can get a Bode Plot Measurement. Bode Plots are a bit tricky to make. It is basically like shaking the system to see how it responds dynamically. You need to shake it hard enough to get some movement but not too hard to get out of normal ranges.  Shake it too little and the measurement will be meaningless or shake it too hard and the measurement will be meaningless. You might read the section in the manual on Bode Plots:
>
> http://dynomotion.com/Help/BodeScreen/BodeScreen.htm
>
> Set things to your most reasonable settings and go to the Bode Plot Screen. Then select Time domain and make measurements while adjusting the stimulus amplitude until you see some activity in the red plot, but not too huge of output commands (green). Then make a frequency domain plot.
>
>
> I believe I do see some mechanical issues in your system in the previous plots. Most likely some backlash or stiction. If you zoom in looking at the Position plot (red) when the axis comes to a stop it seems to stick. The output (green) plot ramps up a fair amount with still no change in position at all. Then suddenly it jumps. It is hard to say how bad things really are without knowing the resolution of your system.
>
> Regards
> TK
>
>
>
>
> ________________________________
> From: ricochetproducts <steveklemp@...>
> To: DynoMotion@yahoogroups.com
> Sent: Friday, June 21, 2013 5:34 AM
> Subject: [DynoMotion] Re: Trouble Setting DAC configuration
>
>
>
> Â
> Hi Tom, New files uploaded. I did add the filter (None to 1000) and did see improvement. I was able to add some more I. (.0005 to .0009) Then I added more filter (2500 hz) till the plot seemed to get worse instead of better, then I back the filter off a little (2150 hz) .I think the plots are getting better. But, With more I, The servo seems to want to hunt more. I posted a video of this so you could see what I am talking about. I raised the D (30 to 43)up as far as I could. Any more and it seems to sound like the Axis is in a bind and makes a growling noise.
>
> "Sorry Control Theory is complicated :}" Yes it is, But Thank You for your patience!
>
> .....Steve
>
> --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> >
> > Hi Steve,
> >
> > That looks as expected.ÃÂ It is somewhat difficult to explain but an integrator will always "overshoot".ÃÂ Or rather any Integrator gain at all guarantees the average error to be exactlyÃÂ zero.ÃÂ If the position spends time under the target position it will force time spent above the target position to cancel out.ÃÂ The higher the gain the faster response.ÃÂ With the super low I gain you had before, the Integrator had a super slow response time of like 1 minute.ÃÂ During the several seconds of movement the Integrator hardly responded at all but accumulated the big (negative) following error for the several seconds.ÃÂ It then forced a small positive error for a minute after the move to make up the difference.ÃÂ If you look back at the earlier plots there still was overshoot.ÃÂ But it was small and lasted for a very long time.
> >
> > Now the Integrator response is much faster.ÃÂ But still relatively slow.ÃÂ It is on the order of several seconds which is about the time to make the move.ÃÂ It has a minor but significant effect.ÃÂ I think it reduced the max following error during the move from ~ 800 counts to ~ 500 counts.ÃÂ ÃÂ But it is just beginning to pull the error from negative to positive by the end of the move, which results in a positive error for about 0.5 seconds.
> >
> > We would like to get the response to be much faster so that the error swings positive and negative several times throughout the move so there is little to be canceled out after the move.
> >
> >
> > Anyways the point I'm trying to make is that it may look worse, but I thing we are actually better off.ÃÂ Sorry Control Theory is complicated :}
> >
> >
> > Before we can increase the I gain any further (I don't really understand what you tried and what happened so I'm sort of running blind)ÃÂ we will probably need to add more D gain.ÃÂ D gain can help make the system more stable.ÃÂ It has a damping effect.ÃÂ You can see 30 count spikes in the output (green plot) caused by the D Gain of 30 every time the encoder changes 1 count.ÃÂ As we increase the D gain the spikes will get bigger and can cause problems (or not really be effective) for the amplifier.ÃÂ NArrow spikes are high frquency things so we can add a Low Pass filter to smooth them out.ÃÂ On the Filters Screen, on the right most Filter Number #2, select 2nd order Low pass, Frequency of 1000, Q=1.4, and push Compute.ÃÂ This should smooth the green spikes.ÃÂ Then try to see how high you can increase the D Gain.
> >
> > HTH
> > Regards
> > TK
> >
> >
> >
> >
> >
> > ________________________________
> > From: ricochetproducts <steveklemp@>
> > To: DynoMotion@yahoogroups.com
> > Sent: Thursday, June 20, 2013 12:32 PM
> > Subject: [DynoMotion] Re: Trouble Setting DAC configuration
> >
> >
> >
> > ÃÂ
> > Hi Tom, I have my latest plots posted now. You will notice that at the top left side of the curve the position rises above the commanded when I increase the I. This is what I was talking about when I said it would overshoot. Also if I raise the I more the servo begins to oscillate. (runs +/-) .002
> >
> > I also changed my move distance to 1" for the test plots.
> >
> > Thanks, Steve
> >
> > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > >
> > > Hi Steve,
> > >
> > > It still seem that the I gain is too low and doing nothing.ÃâàNotice that after motion stops an error of around 25 counts just remains for a long time (0.4 seconds) without being corrected.ÃâàThis is the job of the Integrator.ÃâàAlso during the move an error of around 800 counts persists.ÃâàIncrease the I gain by a factor of 10 and post a plot so we can see what you describe as overshoot.ÃâàActually increase I until the system goes unstable to see where we can operate.
> > >
> > >
> > > Regards
> > > TK
> > >
> > >
> > >
> > > ________________________________
> > > From: ricochetproducts <steveklemp@>
> > > To: DynoMotion@yahoogroups.com
> > > Sent: Wednesday, June 19, 2013 6:06 AM
> > > Subject: [DynoMotion] Re: Trouble Setting DAC configuration
> > >
> > >
> > >
> > > ÃâÃÂ
> > > Hi Tom, I have made changes to my PID per your recomendations. and posted new plot data.
> > > I have increased Max Integrator to 2047 and increased the P and D gains I have also added I gain 0.0001 any higher here and overshoot at the top of the plot.
> > > I have set P to 1.0 I had resonance @ 1.2
> > > I have set the D to 20 I had resonance starting @ 40 and hard stopping at the end of a move @ 24
> > >
> > > I have done all that I know to do at this point and am looking to you for advice. Any input would be appreciated as I really don't understand the plots. Y axis seems to be functioning OK. Just seems to accel and decel a little to fast (in my oppinion)
> > >
> > > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > >
> > > > Hi Steve,
> > > >
> > > > Have you tried the other suggestions?ÃÆ'ââ¬Å¡ÃâàÃÆ'ââ¬Å¡ÃâàWhat happened?
> > > >
> > > > Did you increase the Max Integrator?
> > > >
> > > > Also what is your system resolution?ÃÆ'ââ¬Å¡Ãâà(how many counts per inch or mm)?
> > > >
> > > >
> > > > Regards
> > > > TK
> > > >
> > > >
> > > >
> > > >
> > > > ________________________________
> > > > From: ricochetproducts <steveklemp@>
> > > > To: DynoMotion@yahoogroups.com
> > > > Sent: Monday, June 17, 2013 10:54 AM
> > > > Subject: [DynoMotion] Re: Trouble Setting DAC configuration
> > > >
> > > >
> > > >
> > > > ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > Hi Tom,
> > > > I posted the raw data.
> > > > I changed the Max Limits. OUTPUT 2024 to 2047
> > > >
> > > > Motion Profile Accel 50000000 to 100000
> > > > Jerk 550000 to 1e+006
> > > > PID P.36 to .9
> > > > D 1.5 to 14
> > > > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > > >
> > > > > Hi Steve,
> > > > >
> > > > > The Plot looks reasonable.ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàHowever the following error looks fairly large.ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàIt is hard to see without being able to zoom in or plot in different ways.ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàIf you also saved and posted the raw data we could plot in different ways.
> > > > >
> > > > > You didn't tell us what you tried and what happened.ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàDid you try to increase gains higher (P and D)?
> > > > >
> > > > > I gain should help reduce the persistent errors.ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàStart with a small number like 0.0001 and increase by factors of 2 until you see an effect.
> > > > >
> > > > >
> > > > > You will also need to increase Max Integrator to 2047 to allow the Integrator to make larger corrections.
> > > > >
> > > > > Regards
> > > > > TK
> > > > >
> > > > >
> > > > >
> > > > >
> > > > >
> > > > > ________________________________
> > > > > From: ricochetproducts <steveklemp@>
> > > > > To: DynoMotion@yahoogroups.com
> > > > > Sent: Monday, June 17, 2013 5:51 AM
> > > > > Subject: [DynoMotion] Re: Trouble Setting DAC configuration
> > > > >
> > > > >
> > > > >
> > > > > ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > Hi Tom, I posted some new Graphs this morning, Thanks for all your help!
> > > > >
> > > > > ....Steve
> > > > >
> > > > > --- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > > > >
> > > > > > No problem Steve.ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàPost some graphs of your next results.
> > > > > >
> > > > > > Regards
> > > > > > TK
> > > > > >
> > > > > >
> > > > > >
> > > > > >
> > > > > > ________________________________
> > > > > > From: Steve Klemp <steveklemp@>
> > > > > > To: dynomotion@yahoogroups.com
> > > > > > Sent: Saturday, June 15, 2013 2:47 PM
> > > > > > Subject: Re: [DynoMotion] Re: Trouble Setting DAC configuration
> > > > > >
> > > > > >
> > > > > >
> > > > > > ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > >
> > > > > > hi tom thanks for the reply. I will give it a try. sorry for the upload check box.
> > > > > >
> > > > > > ------------------------------
> > > > > > On Sat, Jun 15, 2013 4:12 PM CDT Tom Kerekes wrote:
> > > > > >
> > > > > > >Hi Steve,
> > > > > > >
> > > > > > >Here are some observations:
> > > > > > >
> > > > > > >On the Config Screen set the Output Gain to -1 instead of -3 to be less confusing.
> > > > > > >
> > > > > > >On the Step Response Screen remove Feed forwards until you get good closed loop performance.
> > > > > > >
> > > > > > >Your Max Jerk Setting is too low (or your acceleration is too high).ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàAt that low jerk it would take ~10 seconds to achieve max acceleration (did you read my post on that earlier today?)
> > > > > > >
> > > > > > >If you are not using any filters make sure they are clear (unity gain).
> > > > > > >
> > > > > > >From that point increase P gain until the system goes unstable then back off by about a factor of 2 and then see where you are.
> > > > > > >
> > > > > > >BTW there is a check box when uploading files to notify everyone in the group.ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàNo need to check that for every file if you are going to follow up with a post anyway.
> > > > > > >
> > > > > > >Regards
> > > > > > >TK
> > > > > > >
> > > > > > >
> > > > > > >
> > > > > > >
> > > > > > >________________________________
> > > > > > > From: ricochetproducts <steveklemp@>
> > > > > > >To: DynoMotion@yahoogroups.com
> > > > > > >Sent: Saturday, June 15, 2013 12:45 PM
> > > > > > >Subject: [DynoMotion] Re: Trouble Setting DAC configuration
> > > > > > >
> > > > > > >
> > > > > > >
> > > > > > >ÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > >Hi Tom, I have uploaded some plot files. I have not tried any filters yet. I don't quite understand them. I need to do some research on them.
> > > > > > >I cant seem to get my drive to start smooth or change direction smooth.
> > > > > > >
> > > > > > >
> > > > > > >--- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@> wrote:
> > > > > > >>
> > > > > > >> Hi Steve,
> > > > > > >>
> > > > > > >> Perform a "Move" on the Step Response Screen.ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàWhat happens?ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâàInclude Screen Shots of your Config, Step Response, and Filters Screens (Alt PrintScreen, paste to Paint.exe, save as *.png) so we can see all your settings.
> > > > > > >>
> > > > > > >> Regards
> > > > > > >> TK
> > > > > > >>
> > > > > > >>
> > > > > > >>
> > > > > > >>
> > > > > > >> ________________________________
> > > > > > >> From: ricochetproducts <steveklemp@>
> > > > > > >> To: DynoMotion@yahoogroups.com
> > > > > > >> Sent: Sunday, June 9, 2013 5:06 AM
> > > > > > >> Subject: [DynoMotion] Trouble Setting DAC configuration
> > > > > > >>
> > > > > > >>
> > > > > > >>
> > > > > > >> ÃÆ'Ã'Ãâ 'ÃÆ'ââ¬Â 'ÃÆ'Ã'ÃââÃÆ'ââââ¬Ã
¡ÃâìÃÆ'ââ¬Â¦ÃâáÃÆ'Ã'Ãâ 'ÃÆ'ââââ¬Å¡Ã¬Ãâ¦Ã¡ÃÆ'Ã'âââ¬Ã
¡ÃÆ'ââ¬Å¡ÃâÃÂ
> > > > > > >> Hi Tom, I am having trouble with my Z axis (Chan2) I am just getting started configuring my drives. I have started with KanalogInitialPID.mot for the configuration. Axis X, & Y seem to be working as commanded. Z axis will not operate from the console. I have noticed while watching the Analog output screen, If I send a command from the console I see no change to the output. When I change the
> > > > > > >> the Gain on the configuration page I do see a change to the Analog screen and the Axis will move, either + or or -, depending on what I put in the Gain.
> > > > > > >>
> > > > > > >> Thanks, Steve
> > > > > > >>
> > > > > > >> PS. I am using the latest software update ver 431
> > > > > > >>
> > > > > > >
> > > > > > >
> > > > > > >
> > > > > >
> > > > >
> > > >
> > >
> >
> |
|
| Group: DynoMotion |
Message: 7744 |
From: Tom Kerekes |
Date: 6/22/2013 |
| Subject: Re: Trouble Setting DAC configuration |
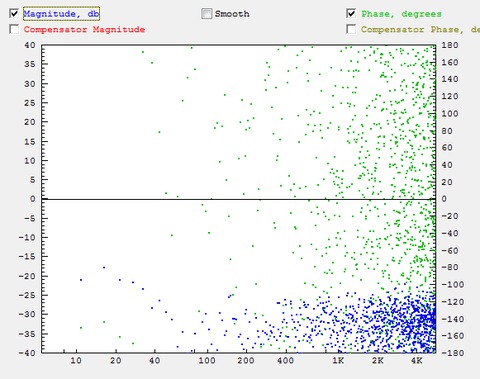
Hi Steve, The Bode Plot is all just noise so not of any value. See attached. You didn't explain what you tried regarding setting the Bode plot stimulus amplitude. Include a screen shot of a Time Domain so I can check if the system is being stimulated enough to get some substantial response with out being completely over driven (saturated). Regards TK
| | | | | | | | | | | | | | | | | |
{kind=link}